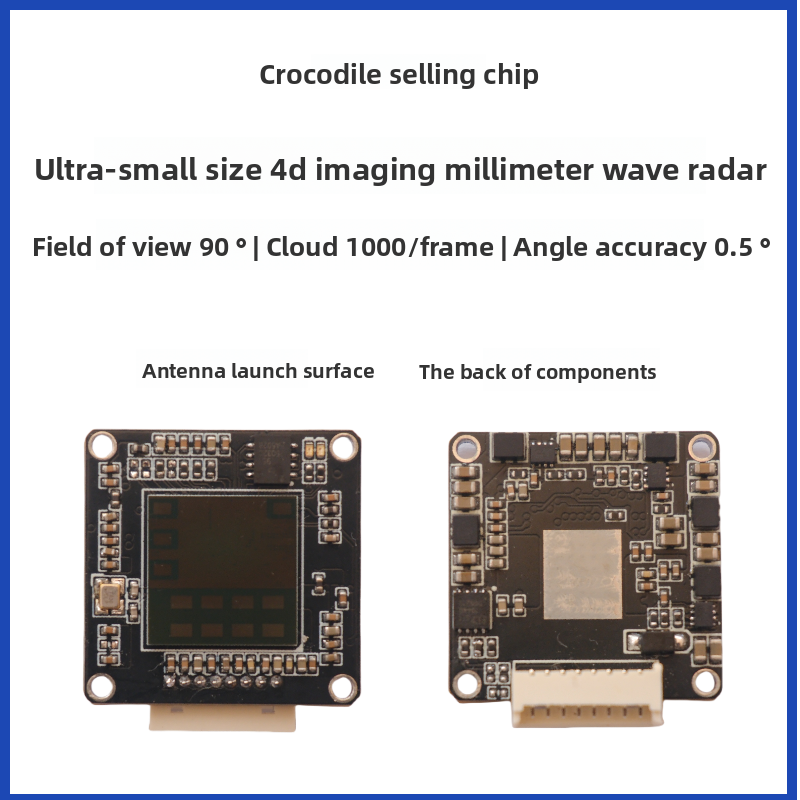
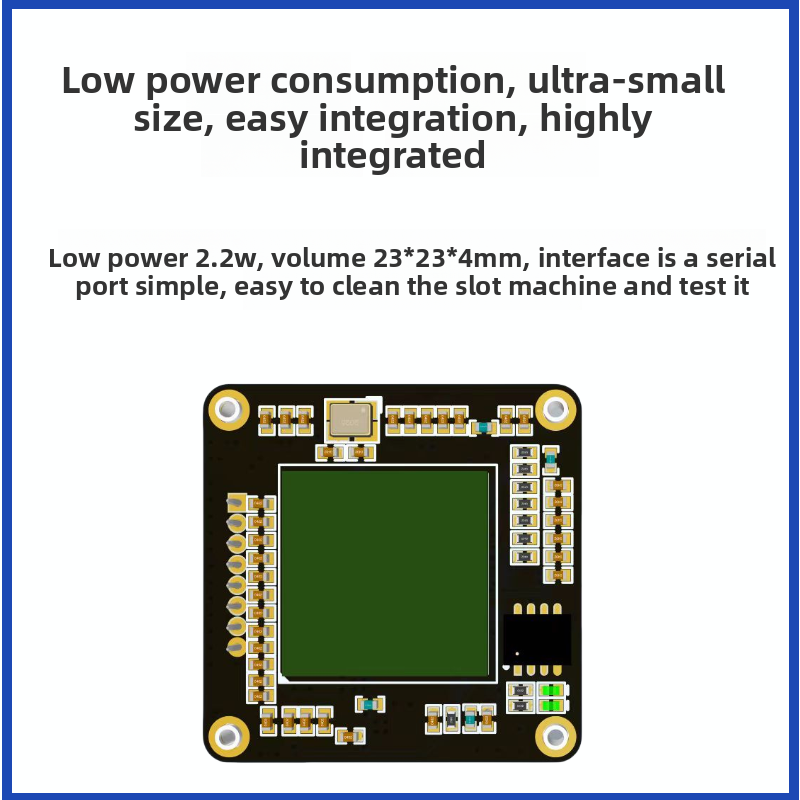
Mini 60G mmWave 4D Imaging Radar: Ultra-Compact Design for Precise Obstacle Avoidance and Blind Spot Detection
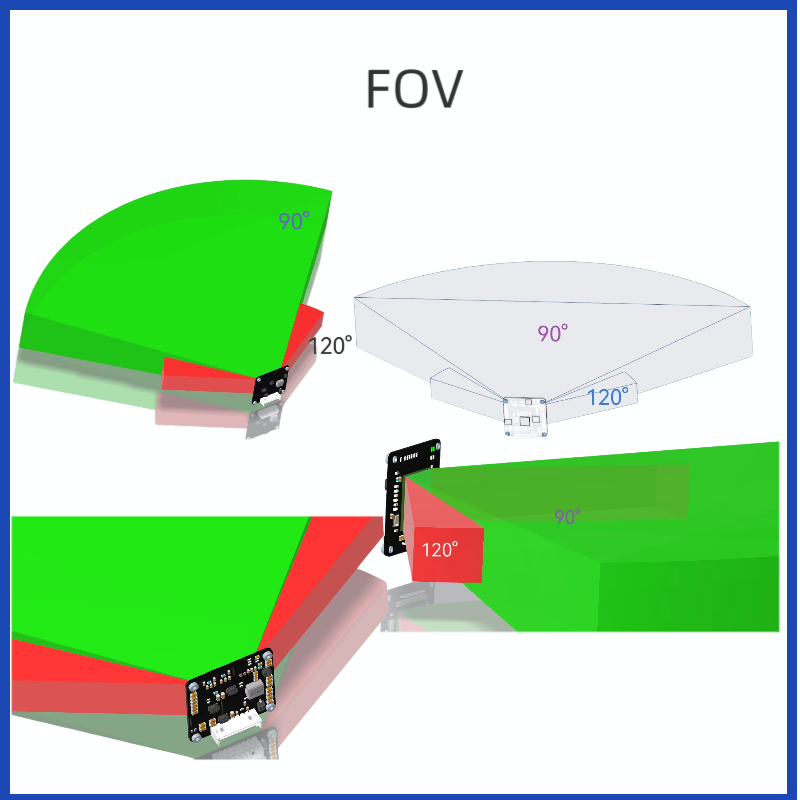
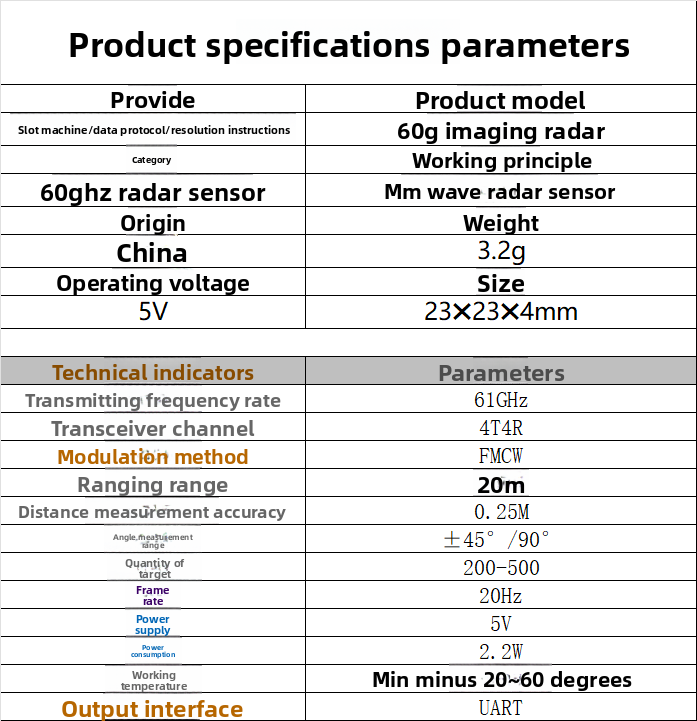
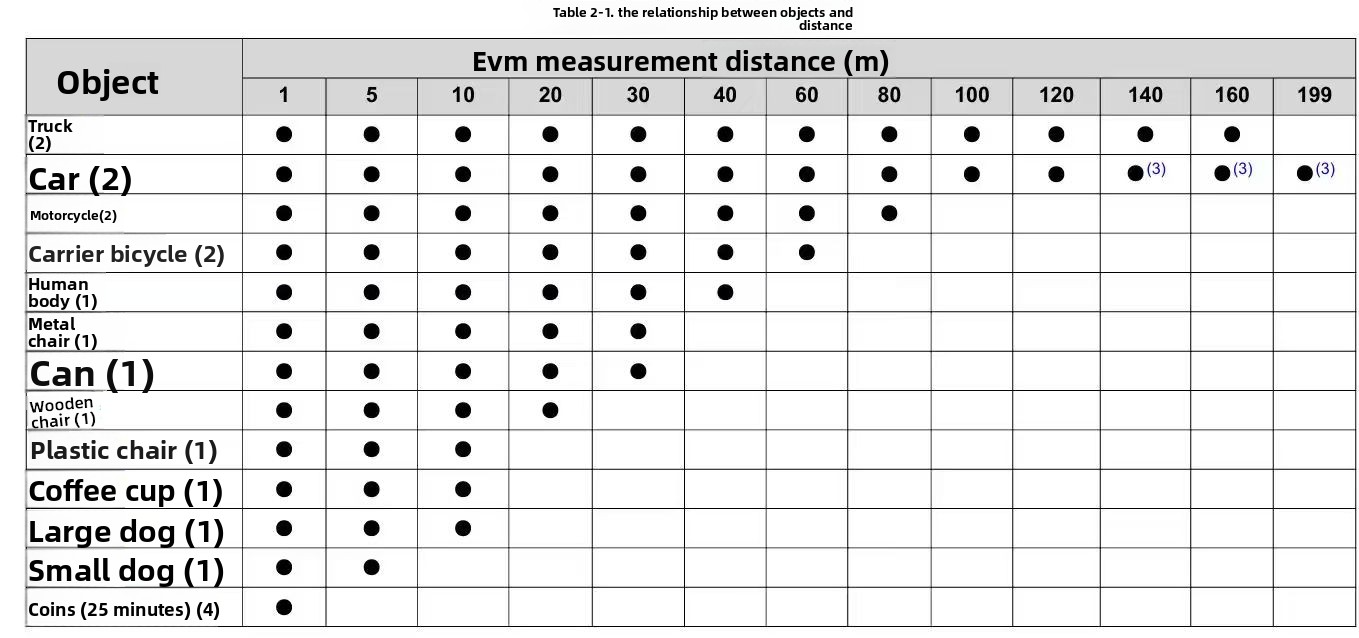
This mini 60G mmWave 4D imaging radar, measuring just 23×23×4mm, is specifically engineered for intelligent driving, UAVs, and robotic obstacle avoidance, breaking through traditional radar size constraints while delivering high-precision environmental perception. Operating in the 60GHz band, it employs 4D imaging technology (range, velocity, azimuth, elevation) to achieve 360° blind spot-free detection with a range of 0.1–20 meters, 2.5cm range resolution, and a 120°×120° horizontal/vertical field of view, enabling precise identification of low-lying obstacles, pedestrians, and dynamic targets.
Technical Highlights:
- 4D Point Cloud Imaging: Supports tens of thousands of point cloud outputs per second, enabling real-time 3D environmental modeling and enhancing target classification accuracy in complex scenarios.
- Superior Interference Resistance: Outperforms LiDAR in rain, fog, and snow penetration, ensuring reliable operation in all weather conditions.
- Low Power Consumption: Features four power modes (off, standby, idle, active), with standby power as low as 10μA, ideal for battery-powered devices requiring extended runtime.
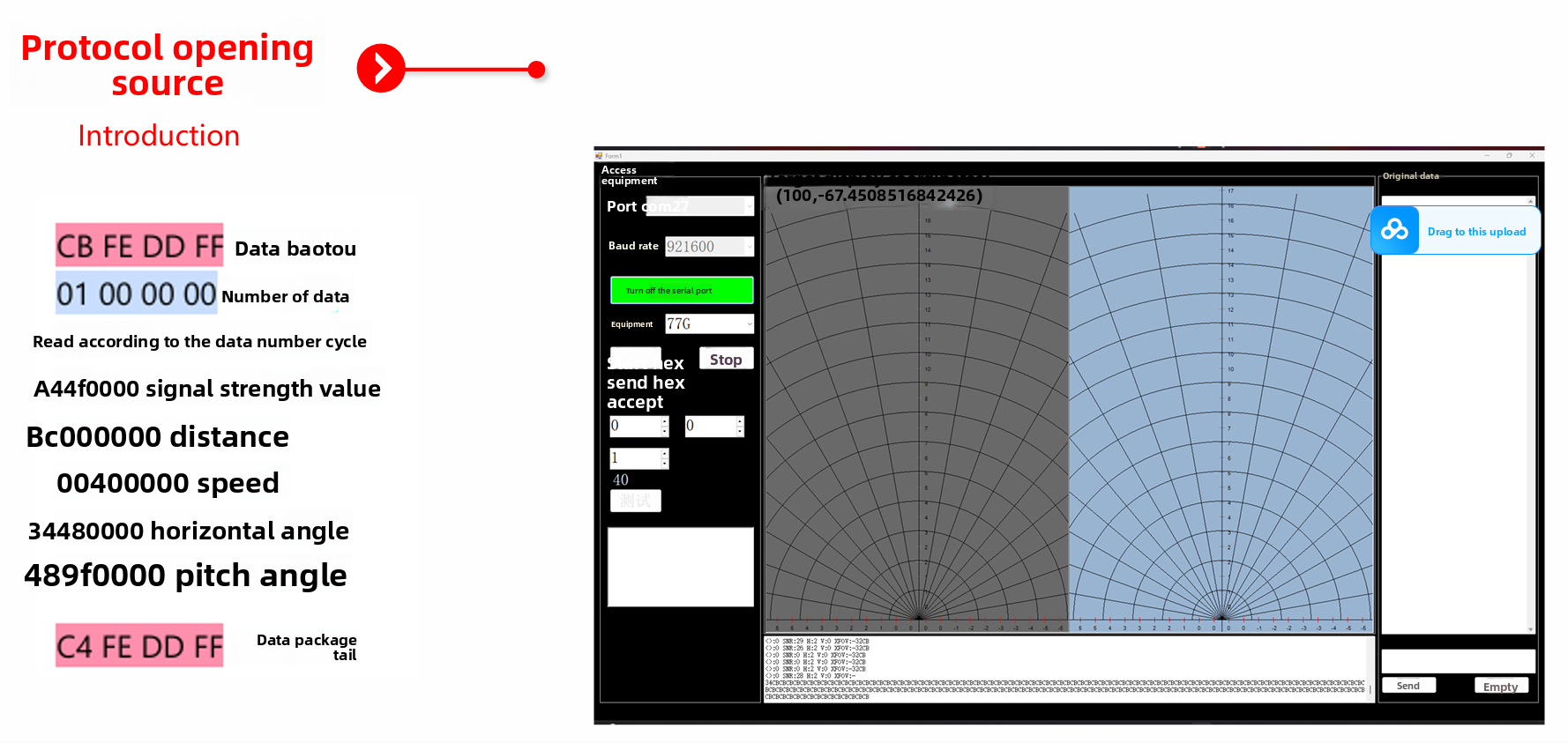
- Multi-Interface Compatibility: Integrates UART/SPI/I²C digital interfaces for plug-and-play compatibility with mainstream smart hardware platforms.
Applications:
- Intelligent Driving: Blind spot monitoring, automatic parking, low-speed AEB (Autonomous Emergency Braking).
- UAVs: Obstacle avoidance navigation, terrain following, collision warning.
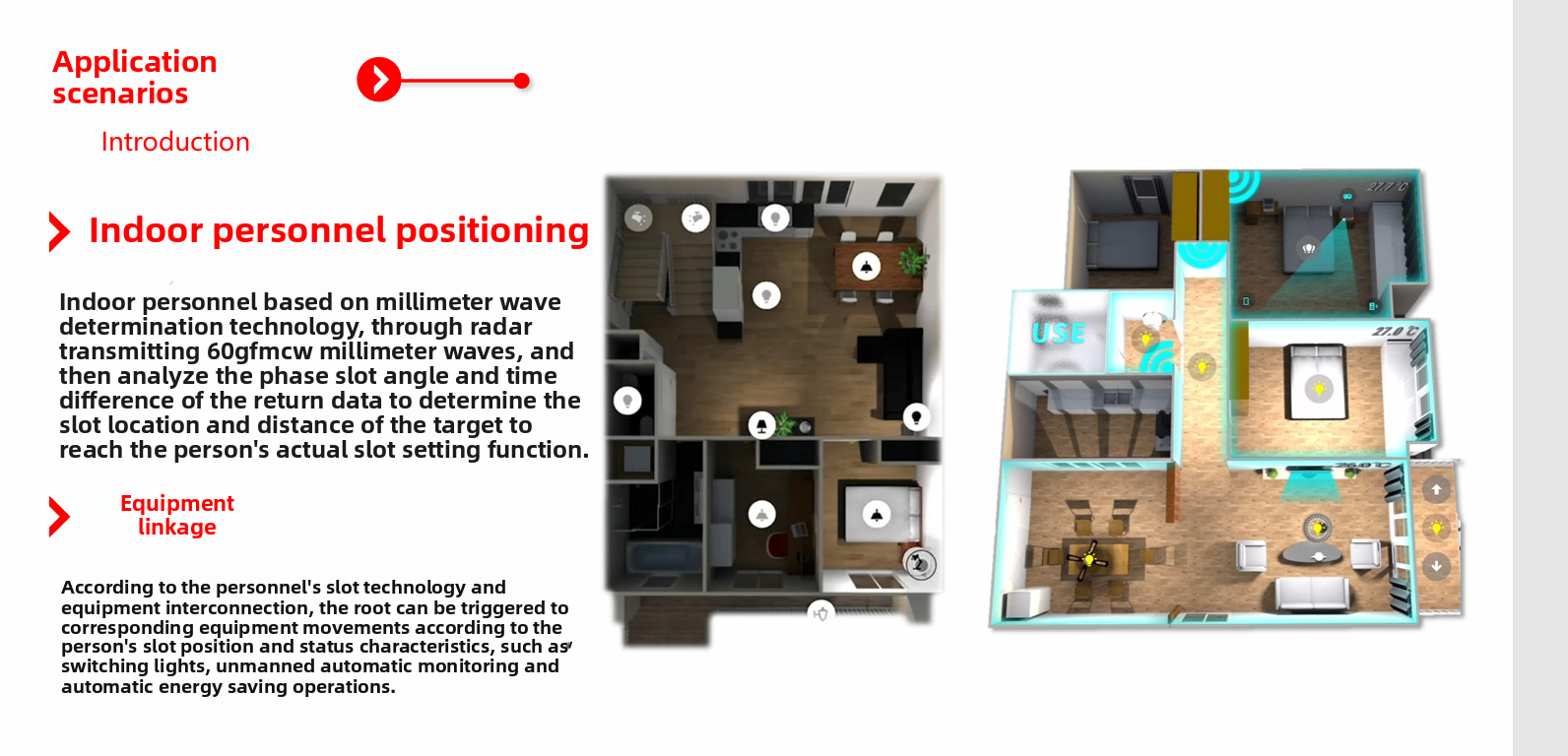
- Robotics: AGV path planning, service robot autonomous navigation.
Technical Parameter Comparison:
| Parameter |
Mini 60G 4D Radar |
Traditional 24GHz Radar |
| Size |
23×23×4mm |
≥50×50×15mm |
| Detection Range |
0.1–20m |
≤10m (highly environment-dependent) |
| Angular Resolution |
1° (horizontal/vertical) |
≥5° |
| Power Consumption |
10μA (standby) |
≥100μA (standby) |
| Point Cloud Density |
Tens of thousands/sec |
≤Thousands/sec |